工业机器人组态设计课程小组汇报
作者:康思淼来源:时间:2021-04-22
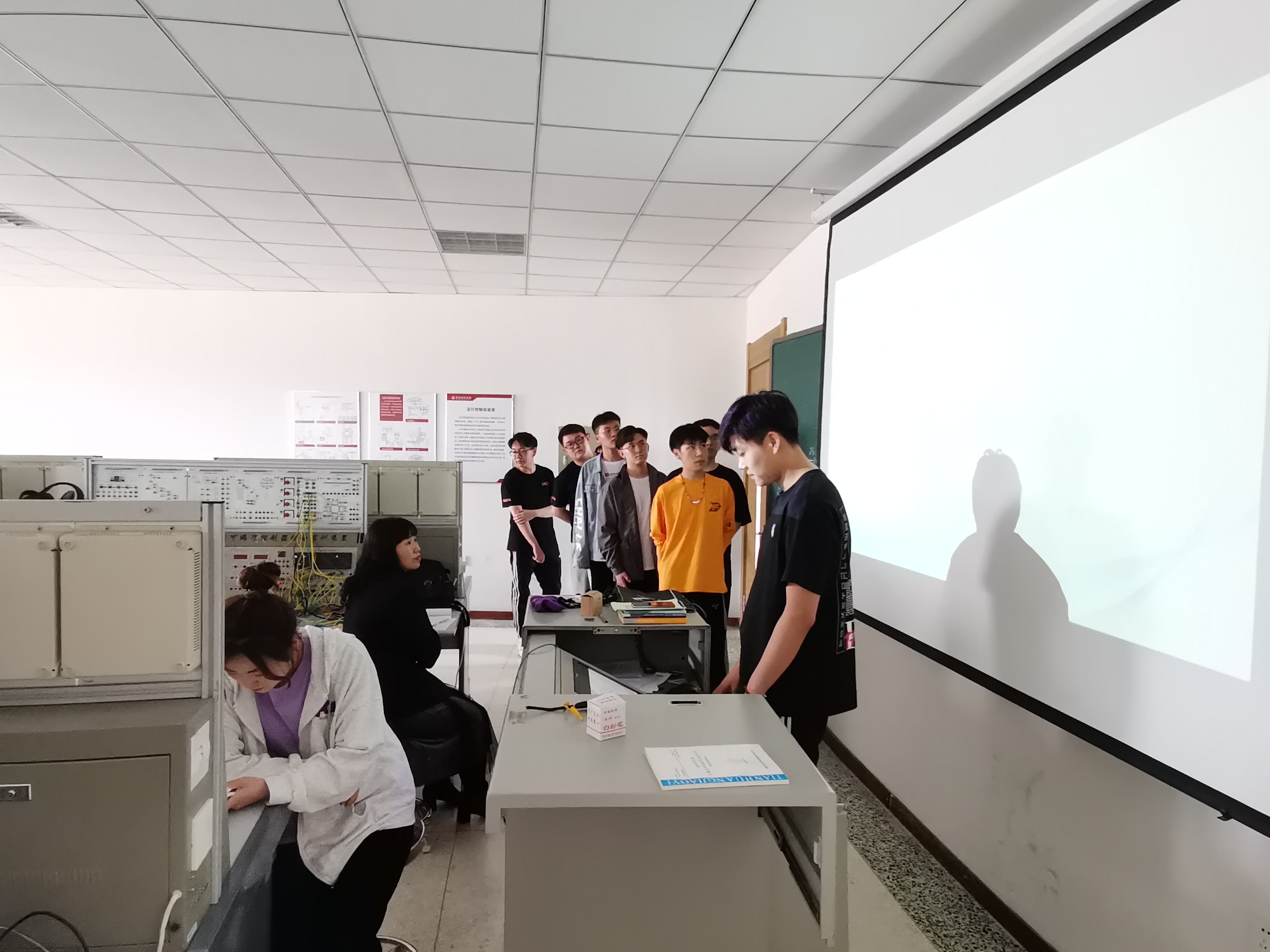
本网讯(智能工程学院 )为对接行业人才需求,培养接地气、上手快的应用型专业人才,践行学校提倡的以自主学动手学为特征的实践化教学,智能工程学院机器人工程专业和自动化专业携手共建了极具特色的专业课程“工业机器人组态设计”。2021年4月20日,该课程进入第一阶段最后的调试和小组汇报环节。
 康思淼
康思淼
孟军红主任给此次汇报下达的小组任务是让同学们分组自行设计机械手的作业行为,并编制梯形图,利用运行控制实验室的PLC的设备完成调试。


此次表现最为优异的,是刘奇小组。他们第一个完成项目,开始了全员小组汇报。
刘奇介绍了小组内部分工:
刘奇负责PLC梯形图设计、符号表、程序调试;
彭昱翰负责PLC外部接线图和程序调试;
王梓洋负责程序框图和程序测试;
张嘉轩负责机械臂工作原理收集和汇报书整理;
龚颖骥负责机械臂的应用测试;
宋瑶瑶负责端口分配和接线图绘制;
武泓译负责机械臂的应用原理收集;
王佳琦负责语句表、程序调试。


彭昱翰介绍了程序调试过程遇到的无法编译的问题。经过反复研究,发现是延时复位组件导致的,去掉该组件后,程序调通。
刘奇补充,还有一种方法,是将延时复位时间延长。
孟军红主任反馈,19机器人工程专业的同学们对这门课的学习主动性非常高。大部分小组为了更好地完成此次小组任务,主动在上一个周六和周日两天到运行控制实验室来调试程序。调试过程中,同学们遇到并提出了大量的问题,孟老师都加班加点帮助同学们解决。老师无私奉献,学生勤奋学习。相信老师们在PST-CCE人才培养模式中用爱心浇筑的智能学子,将来走向工作岗位一定能够在成为行业顶梁柱。
下一页: 机器人仿真培训和肘关节参数调试