
沈阳城市学院专业介绍系列报道(三十六)机器人工程专业:蝉联Robocup机器人世界杯中国赛区冠军
作者:来源:时间:2021-07-15
关键词:机器人、新工科、实践教学、RoboCup
培养目标
面向人工智能及智能制造领域,基于国内外机器人行业岗位能力需求和专业技术发展趋势,培养德、智、体、美、劳全面发展,掌握机器人智能感知、目标识别与追踪、运动控制、智能决策、机器人教育等基本知识,具有广阔的国际视野、较强的团队合作意识和创新精神,具备仿生机器人应用与研发、工业机器人应用与运维、机器人技术传播与基础科学研究等专业能力,为从事机器人领域的科学研究和实际应用奠定坚实基础。


主要课程
《专业导论》《机器人本体设计技术》《智能系统电子设计基础》《机器人操作系统与应用》《机器人智能感知技术》《机器人学》《机器人运动控制技术》《机器人目标辨识与跟踪》《工业机器人组态设计》《智能系统软件开发》等。

人才培养模式
专业以培养高端应用型人才为指导,实施“以岗位能力形成为核心的职业情境化人才培养模式”,构建以“自主学、动手学”为主要特征的实践化教学体系。通过课程内容与职业标准对标、教学环节与生产过程融合,培养学生掌握扎实的专业理论知识和熟练的岗位实操技能,确保专业教学与实际工作的无缝对接。
师资队伍

吴峰华
东北大学控制理论与控制工程专业博士,中科院沈阳自动化研究所博士后,副教授,高级工程师,沈阳市高层次人才拔尖人才,沈阳市仿人机器人重点实验室主任、机器人工程专业带头人。参与完成国家自然科学基金重点项目1项、国家973项目1项,发表论文20余篇。主讲课程《智能系统软件开发》《机器人智能决策系统》《机器人前沿知识讲座》《Humanoid Behavior Decision》《Brain-controlledHumanoid》等。

杨哲海
信息工程大学工学博士,副教授,机器人工程专业系主任,双师型教师。长期从事机器人工程领域的科研和教学工作。主持或参与国家863课题4项,研发成果获得科技进步二等奖2项、三等奖8项,在各类核心刊物发表学术论文30余篇。2018年作为指导教师之一,带领团队获得RoboCup足球机器人世界杯中国赛冠军。主讲课程《人工智能教育》《机器人操作系统与应用》《神经网络算法与实现》《AI and Robot》等。

金鑫
韩国亚洲大学电子与计算机工程专业工学博士,机器人工程专业双师型教师,机器人智能感知与运动控制实验室主任。曾参与多个韩国交通研究院、韩国教育科学院的科研项目,辽宁省省级项目,发表论文十余篇,获得专利2项。主讲课程《智能系统电子设计基础》《机器人智能感知技术》《智能建模与系统优化》《信号与机器人系统》《机器人前沿知识讲座》《Humanoid Motion Control》等。

王承业
毕业于北京科技大学机械设计及理论专业,副教授,机器人工程专业双师型教师、工业机器人实验室主任、仿真实验室主任。从事类人足球机器人结构优化设计、动力学仿真等研究工作,指导学生参加2018RoboCup机器人世界杯比赛并获得国内赛冠军、国际赛第六名的佳绩。负责智能工程学院动力学仿真实验室的相关科研工作,在国内外核心期刊发表多篇专业论文。主讲课程《机器人本体设计技术》《机器人智能仿真设计》《工业机器人组态设计》《Humanoid FEM Analysis》《机器人材料与加工技术》《智能建模与加工工艺》等。

刘荫忠
吉林大学计算机科学与技术专业硕士研究生,南开大学自动控制专业学士,机器人工程专业双师型教师,研究员,研究生导师,沈阳市科技专家数据库专家。参与完成国家科技重大专项3项、国家973项目1项,获省级以上科学技术奖2项、科技成果奖1项,发明专利17项,培养指导多名硕士研究生。主讲课程《机器人运动控制技术》《电气控制技术与PLC》《智能建模与系统优化》《Humanoid Control》等。
特色课程
《机器人本体设计技术》,通过本课程的学习,学生能够了解机器人本体设计的基本过程,熟悉机器人本体结构组成和设计软件的使用,掌握机器人本体零部件的智能设计、装配、干涉检查、渲染、运动学仿真技术的基本理论和基本方法以及标准化工程图生成方法,熟练运用SolidWorks软件在草图绘制、三维建模、装配体设计、工程图设计和仿真分析等功能模块实现机器人整机设计,具备学习机器人高级仿真与材料加工等相关课程的基础。

机器人仿真实验室
《机器人操作系统与应用》,通过本课程的学习,学生能够了解ROS基本概念以及主要特点,熟悉ROS总体结构框架,掌握Linux操作系统的安装流程、ROS的安装与环境配置,熟练应用 Linux系统的常用命令及ROS基本操作,具备熟练编写ROS程序和调试的能力,以及仿真实现能力。学习本课程后,学生能够完整搭建系统平台,配置环境,独立编写调试ROS程序,为学习机器人目标辨识与跟踪、机器人智能仿真设计等课程奠定专业基础。

机器人视觉实验室
《工业机器人组态设计》,通过本课程的学习,学生能够了解工业机器人组态设计的基本过程,熟悉机器人仿真和离线编程设计软件的使用,掌握工业机器人仿真工作站的构建、常用机构创建的基本理论和基本方法,熟练运用RoboDK软件在机器人模型、变位机模型等常用机构创建、机器人仿真编程等功能模块实现工业机器人组态设计,具备创建工业机器人复杂搬运仿真案例的基础。
工业机器人实验室
《智能控制系统开发》,通过本课程的学习,学生能够了解机器人运动控制系统的决策逻辑和动作行为的基本理论与知识,熟悉机器人运动控制原理及功能模块的逻辑关系,掌握行为建模状态关系的构成,具备机器人运动控制算法参数调节能力,能够熟练运用C++软件和OpenCV开发库编程完成机器人行为逻辑实现和代码调试,具备开发机器人运动控制系统能力。

智能感知与运动控制实验室

实践教学条件
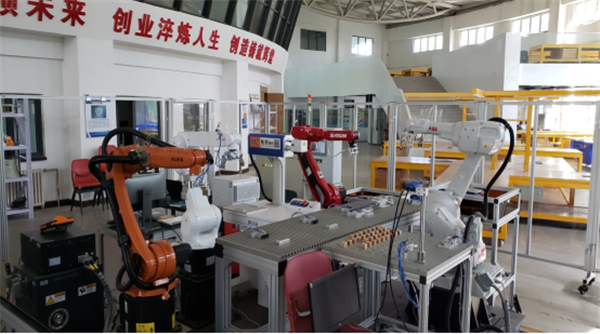
工业机器人生产线
机器人工程专业校内实训场地面积4000余平方米,下设智能感知与运动控制实验室、机器人视觉实验室、机器人仿真实验室、工业机器人实验室,拥有自主研发的四代SYCU仿人足球机器人、TurtleBot3移动机器人、ABB/KUKA/新松/珞石工业机器人生产线、多体动力学仿真软件Adams等高端硬件设施和软件环境,能够满足专业全体学生并发实验需求。

SYCU机器人
专业与沈阳新松机器人自动化股份有限公司建立了战略合作关系,与沈阳富创精密设备有限公司、沈阳智能机器人创新中心有限公司等多家公司建立了辽宁省大学生校外实践教学基地、校企合作单位,可为机器人工程专业学生提供优质校外实训环境。
校企签约仪式

校外实践教学基地
学生获奖情况
机器人团队蝉联2018、2019年度RoboCup机器人世界杯中国赛区冠军,分获世界赛第六名、第四名的好成绩。

SYCU机器人团队载誉归来
RoboCup中国赛区冠军、金靴奖获奖证书
大学生省级竞赛部分获奖情况

省级竞赛获奖证书
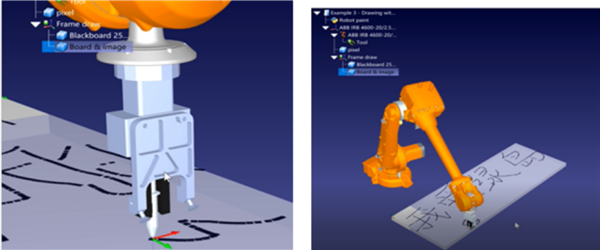
部分获奖成果展示

写字机器人(2019级机器人工程2班 邱宇嫣作品)
海岸线仿真机器人(2020级机器人工程1班 闻冠轩晨作品)

就业方向
机器人工程专业毕业生具有“强技能、宽口径”的突出特点,既可以在工业机器人、服务机器人、特种机器人、机器人教育等领域从事机器人应用、运维、科研、基础研究等工作,也可以在机械设计制造、自动化、计算机等机器人相关领域从事机械产品设计、工业控制、嵌入式系统研究、算法设计与编程等工作。
上一页: 专业介绍

 沈阳城市学院官方微博
沈阳城市学院官方微博 沈阳城市学院微信平台
沈阳城市学院微信平台